Gaussian quadrature
In numerical analysis, a quadrature rule is an approximation of the definite integral of a function, usually stated as a weighted sum of function values at specified points within the domain of integration. (See numerical integration for more on quadrature rules.) An n-point Gaussian quadrature rule, named after Carl Friedrich Gauss, is a quadrature rule constructed to yield an exact result for polynomials of degree 2n − 1 or less by a suitable choice of the points xi and weights wi for i = 1,...,n. The domain of integration for such a rule is conventionally taken as [−1, 1], so the rule is stated as
Gaussian quadrature as above will only produce accurate results if the function f(x) is well approximated by a polynomial function within the range [-1,1]. The method is not, for example, suitable for functions with singularities. However, if the integrated function can be written as  , where g(x) is approximately polynomial, and W(x) is known, then there are alternative weights
, where g(x) is approximately polynomial, and W(x) is known, then there are alternative weights  such that
such that

Common weighting functions include  (Gauss-Chebyshev) and
(Gauss-Chebyshev) and  (Gauss-Hermite).
(Gauss-Hermite).
It can be shown (see Press, et al., or Stoer and Bulirsch) that the evaluation points are just the roots of a polynomial belonging to a class of orthogonal polynomials.
Contents |
Gauss–Legendre quadrature
For the simplest integration problem stated above, i.e. with  , the associated polynomials are Legendre polynomials, Pn(x), and the method is usually known as Gauss–Legendre quadrature. With the nth polynomial normalized to give Pn(1) = 1, the ith Gauss node, xi, is the ith root of Pn; its weight is given by (Abramowitz & Stegun 1972, p. 887)
, the associated polynomials are Legendre polynomials, Pn(x), and the method is usually known as Gauss–Legendre quadrature. With the nth polynomial normalized to give Pn(1) = 1, the ith Gauss node, xi, is the ith root of Pn; its weight is given by (Abramowitz & Stegun 1972, p. 887)
![w_i = \frac{2}{\left( 1-x_i^2 \right) [P'_n(x_i)]^2} \,\!](/2012-wikipedia_en_all_nopic_01_2012/I/caca349155d20da24e3107d74d4d4f03.png)
Some low-order rules for solving the integration problem are listed below.
| Number of points, n | Points, xi | Weights, wi |
|---|---|---|
| 1 | 0 | 2 |
| 2 |  |
1 |
| 3 | 0 | 8⁄9 |
 |
5⁄9 | |
| 4 |  |
 |
 |
 |
|
| 5 | 0 | 128⁄225 |
 |
 |
|
 |
 |
Change of interval
An integral over [a, b] must be changed into an integral over [−1, 1] before applying the Gaussian quadrature rule. This change of interval can be done in the following way:

After applying the Gaussian quadrature rule, the following approximation is:

Other forms
The integration problem can be expressed in a slightly more general way by introducing a positive weight function ω into the integrand, and allowing an interval other than [−1, 1]. That is, the problem is to calculate
for some choices of a, b, and ω. For a = −1, b = 1, and ω(x) = 1, the problem is the same as that considered above. Other choices lead to other integration rules. Some of these are tabulated below. Equation numbers are given for Abramowitz and Stegun (A & S).
| Interval | ω(x) | Orthogonal polynomials | A & S | For more information, see ... |
|---|---|---|---|---|
| [−1, 1] |  |
Legendre polynomials | 25.4.29 | Section Gauss–Legendre quadrature, above |
| (−1, 1) |  |
Jacobi polynomials | 25.4.33 ( ) ) |
Gauss–Jacobi quadrature |
| (−1, 1) |  |
Chebyshev polynomials (first kind) | 25.4.38 | Chebyshev–Gauss quadrature |
| [−1, 1] |  |
Chebyshev polynomials (second kind) | 25.4.40 | Chebyshev–Gauss quadrature |
| [0, ∞) |  |
Laguerre polynomials | 25.4.45 | Gauss–Laguerre quadrature |
| (−∞, ∞) |  |
Hermite polynomials | 25.4.46 | Gauss–Hermite quadrature |
Fundamental theorem
Let  be a nontrivial polynomial of degree n such that
be a nontrivial polynomial of degree n such that

If we pick the n nodes xi to be the zeros of pn , then there exist n weights wi which make the Gauss-quadrature computed integral exact for all polynomials  of degree 2n − 1 or less. Furthermore, all these nodes xi will lie in the open interval (a, b) (Stoer & Bulirsch 2002, pp. 172–175).
of degree 2n − 1 or less. Furthermore, all these nodes xi will lie in the open interval (a, b) (Stoer & Bulirsch 2002, pp. 172–175).
The polynomial is said to be an orthogonal polynomial of degree n associated to the weight function  . It is unique up to a constant normalization factor. The idea underlying the proof is that, because of its sufficiently low degree, can be divided by
. It is unique up to a constant normalization factor. The idea underlying the proof is that, because of its sufficiently low degree, can be divided by  to produce a quotient
to produce a quotient  of degree strictly lower than n, and a remainder
of degree strictly lower than n, and a remainder  of still lower degree, so that both will be orthogonal to , by the defining property of . Thus
of still lower degree, so that both will be orthogonal to , by the defining property of . Thus
 .
.
Because of the choice of nodes xi , the corresponding relation
holds also. The exactness of the computed integral for then follows from corresponding exactness for polynomials of degree only n or less (as is ). This (superficially less exacting) requirement can now be satisfied by choosing the weights wi equal to the integrals (using same weight function  ) of the Lagrange basis polynomials
) of the Lagrange basis polynomials  of these particular n nodes xi.
of these particular n nodes xi.
Computation of Gaussian quadrature rules
For computing the nodes  and weights
and weights  of Gaussian quadrature rules, the fundamental tool is the three-term recurrence relation satisfied by the set of orthogonal polynomials associated to the corresponding weight function. For n points, these nodes and weights can be computed in O(n2) operations by the following algorithm.
of Gaussian quadrature rules, the fundamental tool is the three-term recurrence relation satisfied by the set of orthogonal polynomials associated to the corresponding weight function. For n points, these nodes and weights can be computed in O(n2) operations by the following algorithm.
If, for instance, is the monic orthogonal polynomial of degree n (the orthogonal polynomial of degree n with the highest degree coefficient equal to one), one can show that such orthogonal polynomials are related through the recurrence relation

From this, nodes and weights can be computed from the eigenvalues and eigenvectors of an associated linear algebra problem. This is usually named as the Golub–Welsch algorithm (Gil, Segura & Temme 2007).
The starting idea comes from the observation that, if is a root of the orthogonal polynomial then, using the previous recurrence formula for  and because
and because  , we have
, we have

where ![\tilde{P}=[p_0 (x_j),p_1 (x_j),...,p_{n-1}(x_j)]^{T}](/2012-wikipedia_en_all_nopic_01_2012/I/e40d7fca88274e88ea1ca5ff6dac2d2e.png)
and  is the so-called Jacobi matrix:
is the so-called Jacobi matrix:
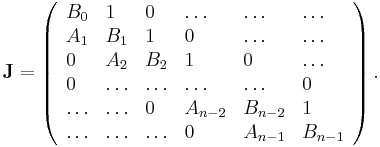
The nodes of gaussian quadrature can therefore be computed as the eigenvalues of a tridiagonal matrix.
For computing the weights and nodes, it is preferable to consider the symmetric tridiagonal matrix  with elements
with elements  and
and 
 and are similar matrices and therefore have the same eigenvalues (the nodes). The weights can be computed from the corresponding eigenvectors: If
and are similar matrices and therefore have the same eigenvalues (the nodes). The weights can be computed from the corresponding eigenvectors: If  is a normalized eigenvector (i.e., an eigenvector with euclidean norm equal to one) associated to the eigenvalue
is a normalized eigenvector (i.e., an eigenvector with euclidean norm equal to one) associated to the eigenvalue  , the corresponding weight can be computed from the first component of this eigenvector, namely:
, the corresponding weight can be computed from the first component of this eigenvector, namely:
where  is the integral of the weight function
is the integral of the weight function
See, for instance, (Gil, Segura & Temme 2007) for further details.
Error estimates
The error of a Gaussian quadrature rule can be stated as follows (Stoer & Bulirsch 2002, Thm 3.6.24). For an integrand which has 2n continuous derivatives,

for some ξ in (a, b), where pn is the orthogonal polynomial of degree n and where

In the important special case of ω(x) = 1, we have the error estimate (Kahaner, Moler & Nash 1989, §5.2)
![\frac{(b-a)^{2n%2B1} (n!)^4}{(2n%2B1)[(2n)!]^3} f^{(2n)} (\xi) , \qquad a < \xi < b . \,\!](/2012-wikipedia_en_all_nopic_01_2012/I/491af0702cc44d4ad5bef4992a40370f.png)
Stoer and Bulirsch remark that this error estimate is inconvenient in practice, since it may be difficult to estimate the order 2n derivative, and furthermore the actual error may be much less than a bound established by the derivative. Another approach is to use two Gaussian quadrature rules of different orders, and to estimate the error as the difference between the two results. For this purpose, Gauss–Kronrod quadrature rules can be useful.
Important consequence of the above equation is that Gaussian quadrature of order n is accurate for all polynomials up to degree 2n–1.
Gauss–Kronrod rules
If the interval [a, b] is subdivided, the Gauss evaluation points of the new subintervals never coincide with the previous evaluation points (except at zero for odd numbers), and thus the integrand must be evaluated at every point. Gauss–Kronrod rules are extensions of Gauss quadrature rules generated by adding  points to an
points to an  -point rule in such a way that the resulting rule is of order
-point rule in such a way that the resulting rule is of order  . This allows for computing higher-order estimates while re-using the function values of a lower-order estimate. The difference between a Gauss quadrature rule and its Kronrod extension are often used as an estimate of the approximation error.
. This allows for computing higher-order estimates while re-using the function values of a lower-order estimate. The difference between a Gauss quadrature rule and its Kronrod extension are often used as an estimate of the approximation error.
Gauss–Lobatto rules
Also known as Lobatto quadrature (Abramowitz & Stegun 1972, p. 888), named after Dutch mathematician Rehuel Lobatto.
It is similar to Gaussian quadrature with the following differences:
- The integration points include the end points of the integration interval.
- It is accurate for polynomials up to degree 2n–3, where n is the number of integration points.
Lobatto quadrature of function f(x) on interval [–1, +1]:
![\int_{-1}^1 {f(x) \, dx} =
\frac {2} {n(n-1)}[f(1) %2B f(-1)] %2B
\sum_{i = 2} ^{n-1} {w_i f(x_i)} %2B R_n.](/2012-wikipedia_en_all_nopic_01_2012/I/c77f8162f24ddb8dddcdd5f2e81da912.png)
Abscissas: is the  st zero of
st zero of  .
.
Weights:
![w_i = \frac{2}{n(n-1)[P_{n-1}(x_i)]^2} \quad (x_i \ne \pm 1).](/2012-wikipedia_en_all_nopic_01_2012/I/dc60d6086449b1dde8c7d5ce3638684f.png)
Remainder: ![R_n = \frac
{- n (n-1)^3 2^{2n-1} [(n-2)!]^4}
{(2n-1) [(2n-2)!]^3}
f^{(2n-2)}(\xi), \quad (-1 < \xi < 1)](/2012-wikipedia_en_all_nopic_01_2012/I/9c457ec6355ccc218cfdca0899e342eb.png)
Some of the weights are:
| Number of points, n | Points, xi | Weights, wi |
|---|---|---|
| 3 |  |
4⁄3 |
 |
1⁄3 | |
| 4 |  |
5⁄6 |
|
1⁄6 | |
| 5 | 0 | 32⁄45 |
 |
49⁄90 | |
|
1⁄10 |
References
- Abramowitz, Milton; Stegun, Irene A., eds. (1972), "§25.4, Integration", Handbook of Mathematical Functions (with Formulas, Graphs, and Mathematical Tables), Dover, ISBN 978-0-486-61272-0
- Gil, Amparo; Segura, Javier; Temme, Nico M. (2007), "§5.3: Gauss quadrature", Numerical Methods for Special Functions, SIAM, ISBN 978-0-898716-34-4
- Golub, Gene H.; Welsch, John H. (1969), "Calculation of Gauss Quadrature Rules", Mathematics of Computation 23 (106): 221–230, doi:10.1090/S0025-5718-69-99647-1, JSTOR 2004418
- Kahaner, David; Moler, Cleve; Nash, Stephen (1989), Numerical Methods and Software, Prentice-Hall, ISBN 978-0-13-627258-8
- Press, WH; Teukolsky, SA; Vetterling, WT; Flannery, BP (2007), "Section 4.6. Gaussian Quadratures and Orthogonal Polynomials", Numerical Recipes: The Art of Scientific Computing (3rd ed.), New York: Cambridge University Press, ISBN 978-0-521-88068-8, http://apps.nrbook.com/empanel/index.html?pg=179
- Stoer, Josef; Bulirsch, Roland (2002), Introduction to Numerical Analysis (3rd ed.), Springer, ISBN 978-0-387-95452-3.
- Temme, Nico M. (2010), "§3.5(v): Gauss Quadrature", in Olver, Frank W. J.; Lozier, Daniel M.; Boisvert, Ronald F. et al., NIST Handbook of Mathematical Functions, Cambridge University Press, ISBN 978-0521192255, MR2723248, http://dlmf.nist.gov/3.5.v
External links
- ALGLIB contains a collection of algorithms for numerical integration (in C# / C++ / Delphi / Visual Basic / etc.)
- GNU Scientific Library - includes C version of QUADPACK algorithms (see also GNU Scientific Library)
- From Lobatto Quadrature to the Euler constant e
- Gaussian Quadrature Rule of Integration - Notes, PPT, Matlab, Mathematica, Maple, Mathcad at Holistic Numerical Methods Institute
- Legendre-Gauss Quadrature at MathWorld
- Gaussian Quadrature by Chris Maes and Anton Antonov, Wolfram Demonstrations Project.
- Tabulated weights and abscissae with Mathematica source code, high precision (16 and 256 decimal places) Legendre-Gaussian quadrature weights and abscissas, for n=2 through n=64, with Mathematica source code.
- High-precision abscissas and weights for Gaussian Quadrature n = 2, ..., 20, 32, 64, 100, 128, 256, 512, 1024 with open source libraries for C/C++ and Matlab.